
![]() メニュー →
メニュー → ![]() ツール →
ツール → ![]() GNSS設定 をタップして、GNSSの設定を行います。
GNSS設定 をタップして、GNSSの設定を行います。
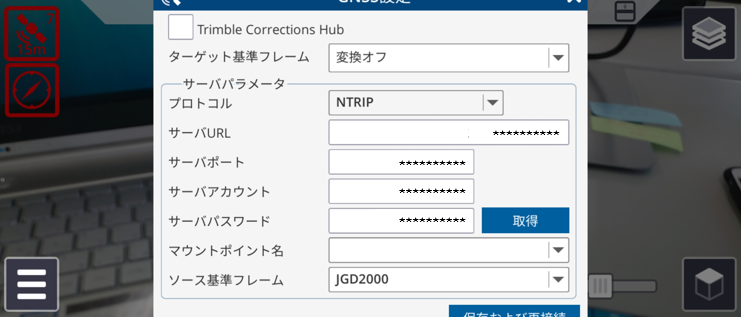
デフォルトでは、SiteVisionはTrimble Corrections Hubを使用してGNSS修正を受信します。サードパーティまたは政府の仮想基準局ネットワークまたはインターネットベースステーション(IBSS)などのローカル補正情報を使用するには、Trimble Corrections Hubの選択を解除し、必要な情報を入力します。(下の画像のように、チェックボックスの☑を外してください。)
| ヒント |
Trimble Corrections Hubのカバーエリアの外にいる場合は、ローカル補正情報を使用します。 |
| 注釈 | すべての修正ソースはインターネットに接続し、インターネット経由でアクセスする必要があります(Wi-Fiまたは3G / 4Gブロードバンドデータ)。 |
Trimble Corrections Hubの使用
SiteVisionシステムは、デフォルトでTrimble Corrections Hubを使用してGNSS補正を受信します。Trimble Positioning System's VRS Now networks(以下、Trimble VRS Now)とTrimble CenterPoint RTX serviceを使用して、世界中どこでも高い精度で利用できます。
互換性のあるGNSS受信機を使用している場合、Trimble VRS Nowのカバーアエリアは、北米、ヨーロッパ、オーストラリア、ニュージーランドの多くの地域で利用できます。
また、Trimble VRSは、GPS、GLONASS、QZSS(一部)、Galileo、BeiDouの衛星システムを完全にサポートするようになりました。
Trimble Corrections Hubを使用する前に、Precision Coverage Mapでカバーエリアを確認してください。
VRS Nowの対象地域では、SiteVisionシステムは通常、数センチメートルの精度で計測ができます。
VRS Nowのカバー地域以外で操作している場合、Trimble Corrections HubはRTXサービスを選択します。
RTXサービスを使用する場合、水平精度は場所によって異なりますが、通常、収束後のRTX Fastカバレッジのあるエリアでは10〜20 cm、RTX Fastのないエリアでは30 cmです。RTXサービスを使用する場合、モデル配置の垂直精度は異なる場合があります。RTXサービスにはグローバルなカバーエリアがあり、Trimble VRS Nowのカバーエリア外のすべてのエリアで使用されます。
道路の建設状況やユーティリティの場所を確認するなど、高い垂直精度が必要なアプリケーションの場合、TrimbleはVRS Nowサービス、サードパーティVRSサービス、またはインターネットベースステーションサービスを使用することをお勧めします。
重要:Trimble Corrections Hubを使用する場合、モデルの参照フレームと一致するターゲット参照フレームを選択する必要があります。SiteVisionシステムは、Trimble Correction Services(ITRF)が使用するデータムからモデルのデータムへのデータム変換を適用します。
これを正しく設定しないと、モデルは正確にジオロケーションされません。
モデルが正しく配置されていないように見える場合は、データのプロバイダーに問い合わせて、モデルがどのデータムにあるかを確認し、一致するようにターゲット参照フレームを設定します。
| ヒント |
SiteVisionシステムの起動時にインターネット接続がない場合、Trimble Correction Hubは衛星配信のRTX修正ストリームまたはローカルSBASサービスに接続します。これが発生し、インターネット接続を再確立した場合、GNSS設定ダイアログで[保存して再接続]をタップしてGNSSサービスを再起動できます。インターネットが提供する修正サービス(VRSまたはRTXover IP)を使用してシステムが再起動します。 |
ローカル補正ソースの使用:NTRIP
Trimble VRS Nowカバレッジゾーン外のエリアで作業している場合、独自のGNSS補正ソースを設定することができます。
NTRIP設定により、修正データをNTRIPキャスターから安全に受信できます。NTRIPソースは次のいずれかです。
- Trimble VRSネットワーク
- トリンブルNTRIPキャスター
- Trimbleインターネットベースステーションサービス(IBSS)
- 別のNTRIP準拠の修正ソース
NTRIPを介してローカル補正ソースを設定および使用するには:
- Trimble Corrections Hubの選択を解除します。
- ローカル修正ソースのサーバーパラメーターを入力します。
- VRSネットワークまたはIBSSの参照フレームに一致するソース参照フレームを選択します。
- ターゲット参照フレームを選択して、座標出力を決定します。
- 〔 保存して再接続 〕をタップして、GNSS設定を確認します。
| 注意 | GNSSに接続して位置を受信しているときに〔 保存して再接続 〕をタップすると、GNSSが再起動/再接続されます。 |
ターゲット参照フレームについて
ネットワーク(Trimble VRS Nowなど)は、ITRF2014などのグローバル参照フレームに関連して座標をブロードキャストします。これは、ソース参照フレームと呼ばれます。
Trimble VRS Nowを使用している可能性がありますが、NZGD2000など、その領域で一般的に使用されているローカル参照フレームに関連する座標が必要です。これは、ターゲット参照フレームと呼ばれます。
- 変換オフ :SiteVisionは、受信者が受信した位置を通過します(修正されているかどうかは関係ありません)。
- Trimble Corrections Hubを使用している場合、座標はITRF2014の観点からなります。
- ローカルNTRIPソースを使用している場合、位置はローカルNTRIPソースと同じ座標系になります。
- 自動選択 :SiteVisionは現在の位置を調べて、現在の位置に基づいて最も可能性の高い参照フレームを検索します。
- ユーザー選択(リストから) :サポートされているデータムのリストから参照フレームを選択すると、これが出力参照フレームになります。
コメント
0件のコメント
サインインしてコメントを残してください。