
2-5 角度センサーキャリブレーション
概要
ブーム・アーム・バケットに取付けたセンサーのキャリブレーションを行います。
前提条件
・全てのデバイスが装着され、各ケーブルも全て接続が完了していること。
※この計測を行う際は、バケットの爪先を必ず地面に付け、各数値の入力が終了するまで動かないようにして下さい。
またこの計測は必ず3ポーズ以上実施して、数値を入力して下さい。
アームのポジションは地面に対して垂直にしないで下さい。
手順
1.1ポーズ目の計測を行います。重機のアタッチメントを操作しバケットの爪先を必ず地面に付けて下さい。
※ブーム・アーム・バケットの角度の指定は特にありません。参考として下さい。
2.入力に必要な数値を記録します。4つの数値を記録して入力します。
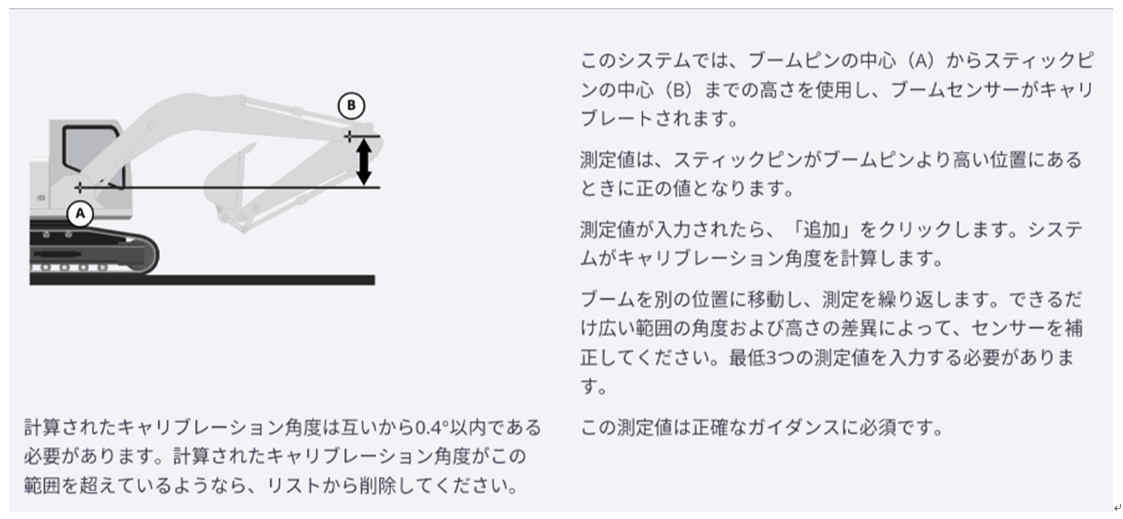
・ブームピンの中心(A)からアームピン(B)の高低差
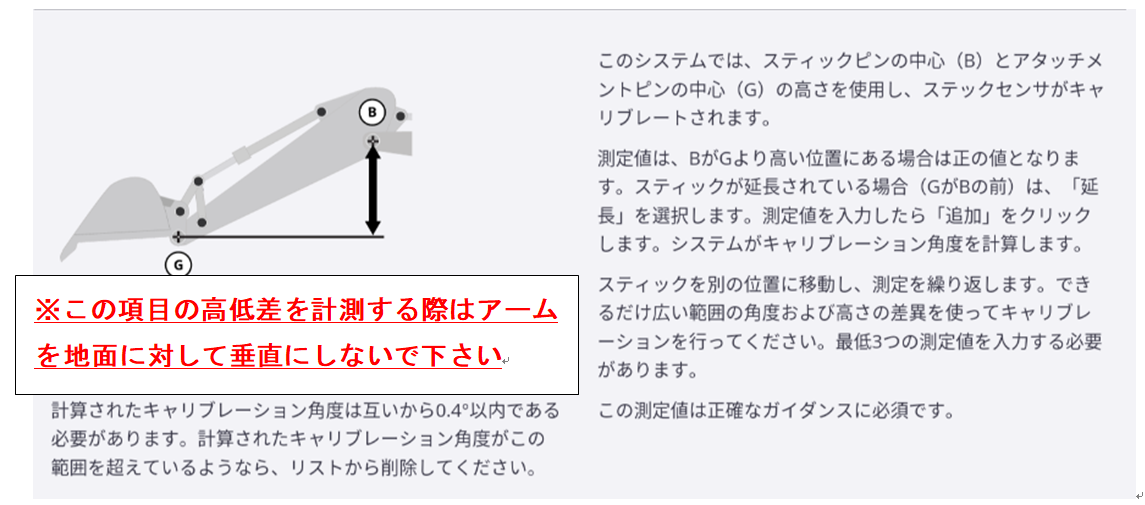
・アームピン(B)とバケットピン(G)の高低差
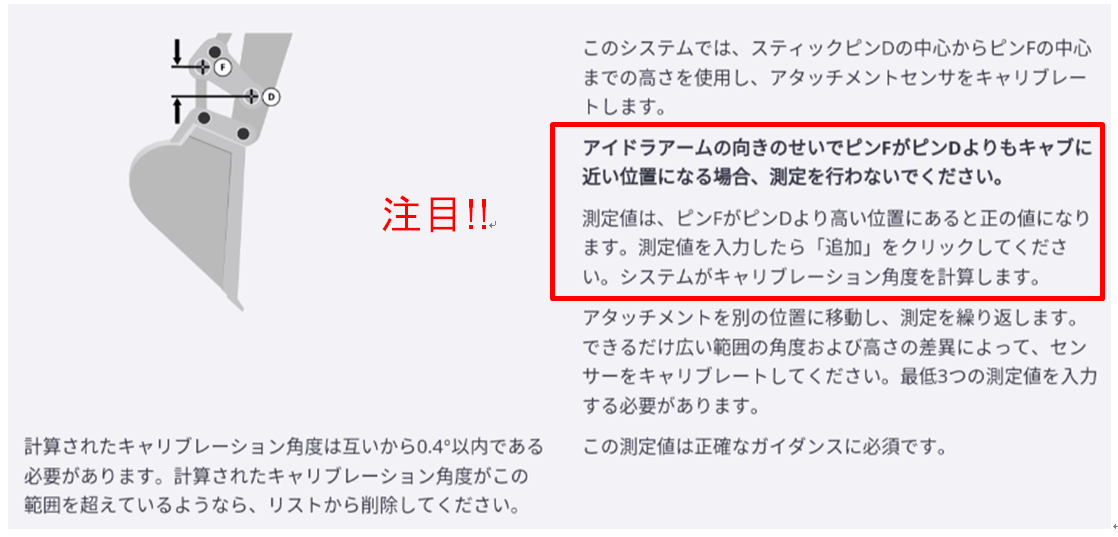
・ピン(D)とピン(F)の高低差
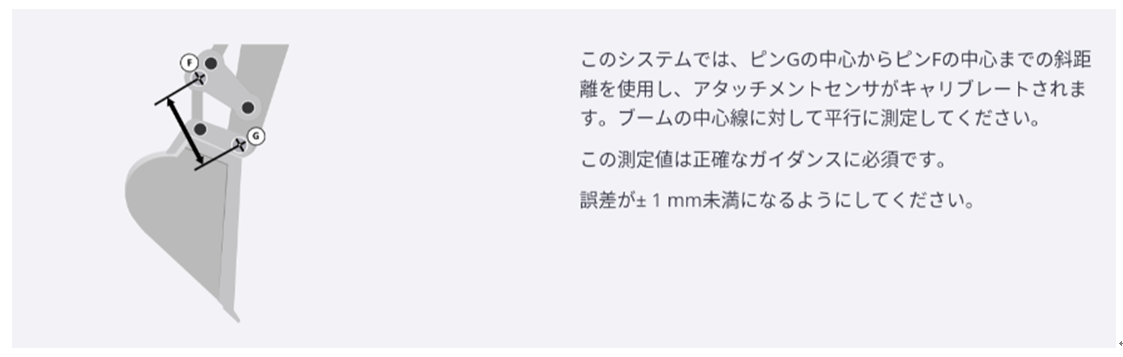
・ピン(F)とバケットピン(G)の斜距離
3.各々の数値が判明したら、入力を行います。
・ブームピンの中心(A)とアームピンの中心(B)の高低差
<設定> → <手動測定>のブーム項目にあります。
入力窓は下の方にあるので、画面をスクロールして下さい。
入力後、<追加>を選択して下さい。

・アームピンの中心(B)とバケットピン(G)の高低差
<設定> → <手動測定>のスティック項目にあります。
入力窓は下の方にあるので、画面をスクロールして下さい。
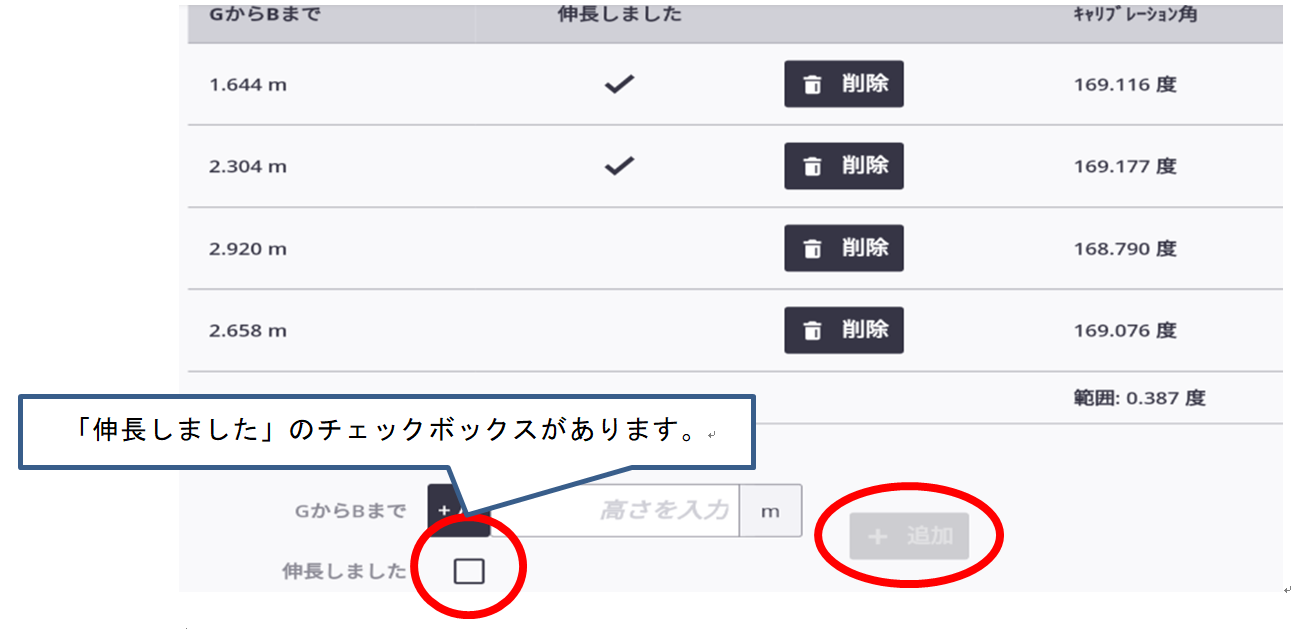
スティックの入力に<伸長しました>とチェックを入れる項目があります。高低差を測定した際のアームの状態でチェックを入れます。
アームピン(B)とバケットピン(G)を垂直にした状態を基準として、それより前方にアームが伸びている場合は<伸長しました>にチェックを入れます。
基準よりキャビン側にアームを巻いた場合にはチェックを入れません。
1ポーズ目の写真を見本とすると、この状態は<伸長しました>にチェックを入れます。
入力後、<追加>を選択して下さい。
・ピン(D)とピン(F)の高低差及びピン(F)とバケットピン(G)の斜距離
<設定> → <手動測定>のアイドラアームの項目にあります。
ピン(D)とピン(F)の高低差は、ピン(F)がピン(D)より上にあると数値は+(プラス)で入力します。ピン(F)がピン(D)より下にあれば数値は-(マイナス)で入力します。
1ポーズ目の写真を見本とすると、この場合は+(プラス)で入力します。
入力窓は下の方にあるので、画面をスクロールして下さい。

①上記項目1~3を最低あと2回繰り返し、入力を続けます。
②各項目3ポーズ以上入力が終了したらキャリブレーション角が範囲に収まっているか確認します。
各項目とも下段の数値を参照します。
※見本はアイドラアームの項目です。ブーム・スティックの項目にはキャリブレーション角の表示のみ1行しかありませんので、ご承知おきください。
赤枠で囲んだキャリブレーション角が0.4度以内であること。
下段はアイドラアームの項目のみに存在します。
青枠で囲んだDGB角度が0.8度以内であること。

赤枠の範囲が0.4度以内の基準に対して0.269度
青枠の範囲は0.8度以内の基準に対して0.352度
よって精度内に入っている事になります。
精度範囲内に入っていない場合には、各ピン間の数値を再度確認して下さい。
コメント
0件のコメント
サインインしてコメントを残してください。