
2-3 車体センサー
概要
Trimble Earthworksには車体の傾きを感知するためのセンサーを搭載しています。
この記事では車体センサーのキャリブレーション手順について説明します。
前提条件
全てのデバイスが装着され、各ケーブルも全て接続が完了していること。
手順
1.車体の<開始>を選択します。

2.車体センサーの内容を確認し、<開始>を選択します。

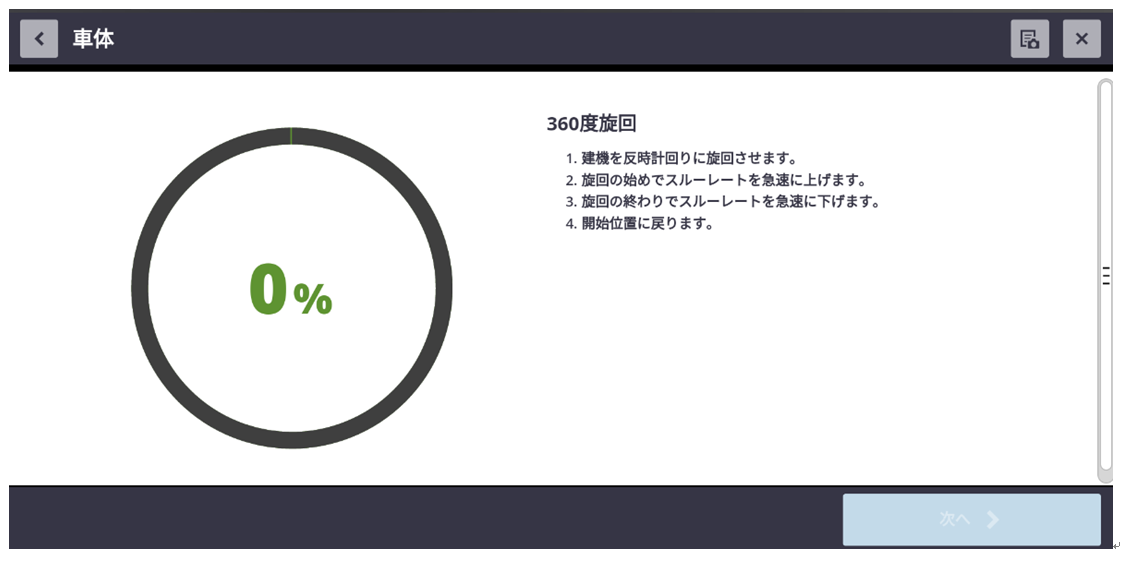
3.360度旋回の項目のコメントを読みます。
※この時重機はなるべく平らで固い面の上に置いて下さい。
※360度旋回させるので、重機の周りの安全を確認して下さい。
上記を確認したら、<読み取り開始>を選択して下さい。

4.重機の動画がインジケーターに変わるので、重機を一定の速度で反時計回りに旋回させて下さい。
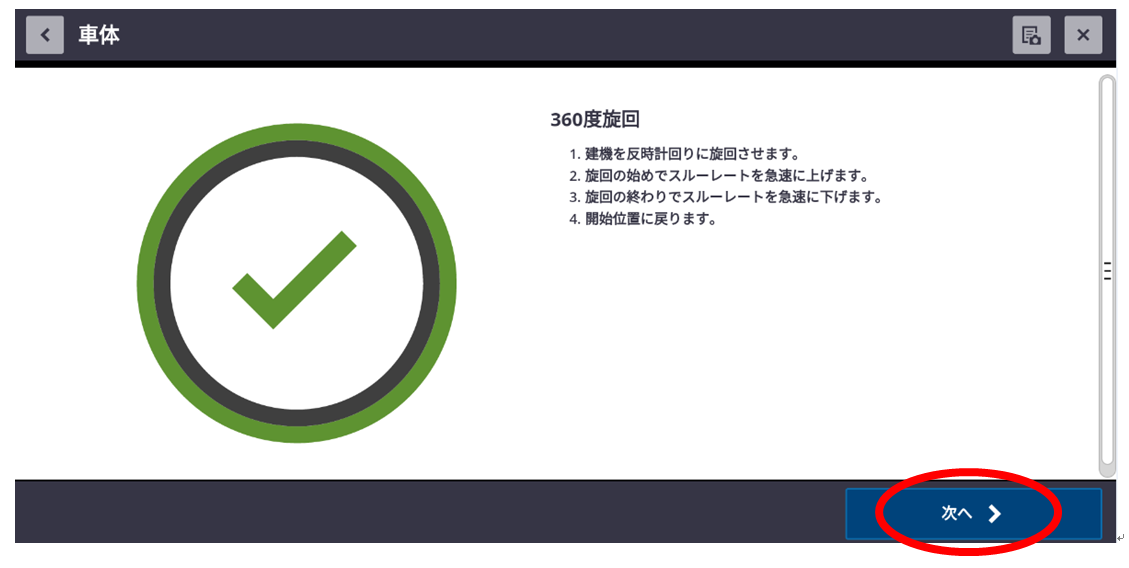
5.インジケーターがチェックマークに変わったら重機を旋回の開始位置に戻し、<次へ>を選択し、次行程へ進みます。
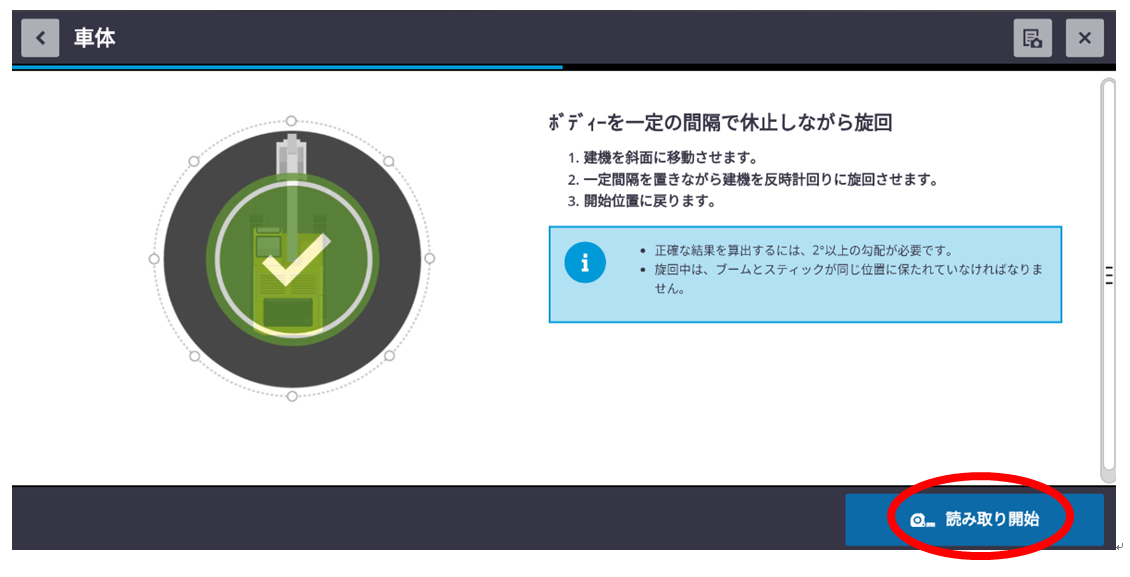
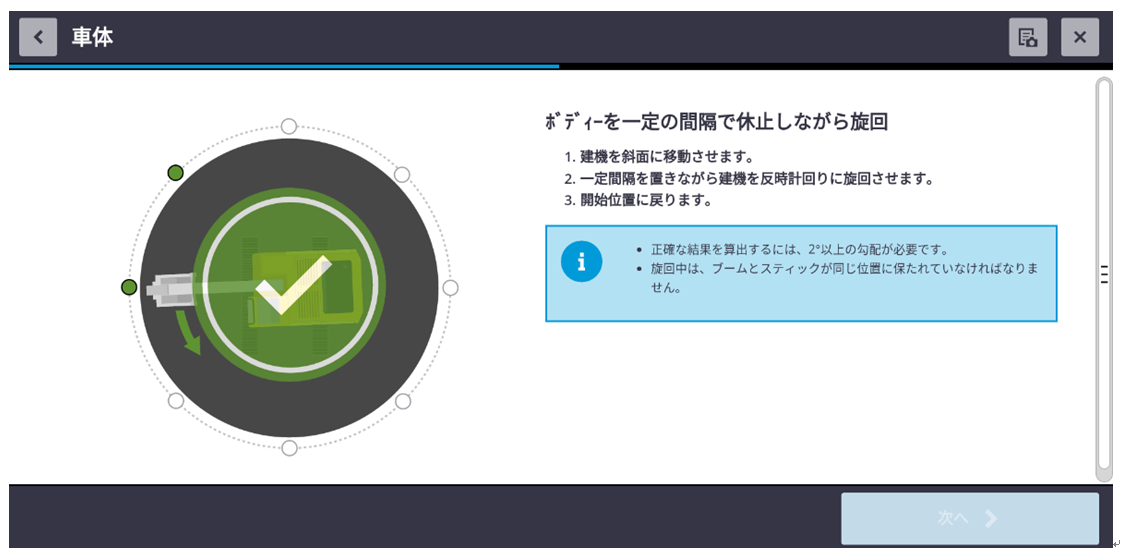
6.重機に傾斜を付けて旋回します。
以下にキャリブレーションを行う際の注意点を記します。
※車体を2°以上傾ける必要があります(推奨は約8°になります)。
※キャリブレーション中はブーム・アームを動かせません。
※反時計周りに一定間隔で計測を行いながら旋回します。
※一定間隔とは45°を指します。
準備が出来たら<読み取り開始>を選択します。
7.画面の指示に従い、反時計方向にゆっくり旋回します
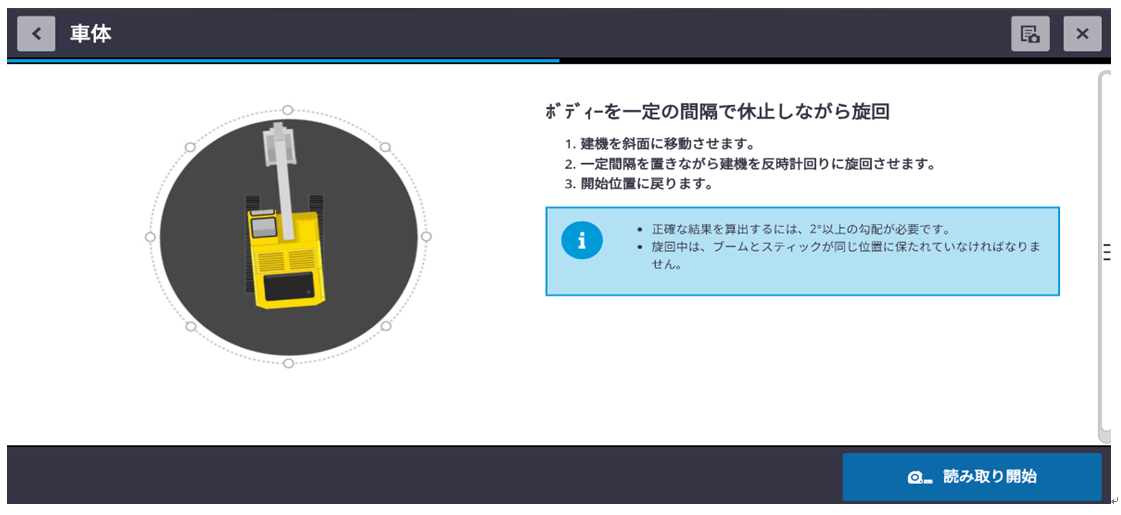
反時計回りに45°旋回すると画面の表示が切り替わるので、そこで旋回を止めます。

8.画面が切り変わったら、再度反時計回りにゆっくり旋回します。

9.再び反時計回りに45°旋回すると画面が切り替わるので、そこで旋回を止め、チェックマークに変わった後、反時計方向に矢印が表示されるので、再び重機を反時計回りにゆっくり旋回させます。
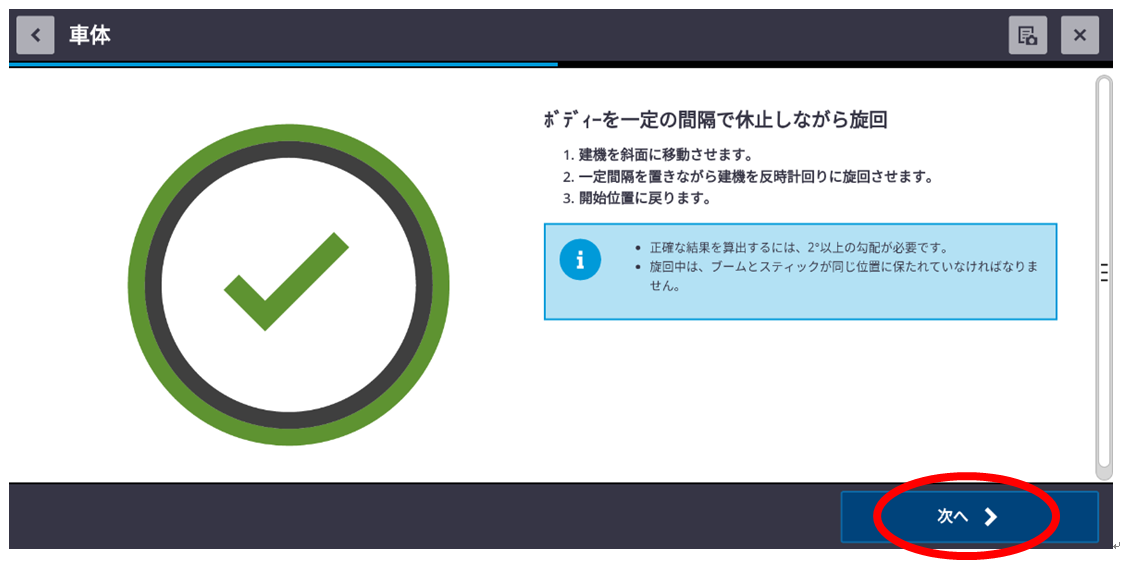
10.この操作を重機が360°旋回するまで繰り返します。
キャリブレーションが終了すると、下段の画面が表示されるので、<次へ>を選択します。
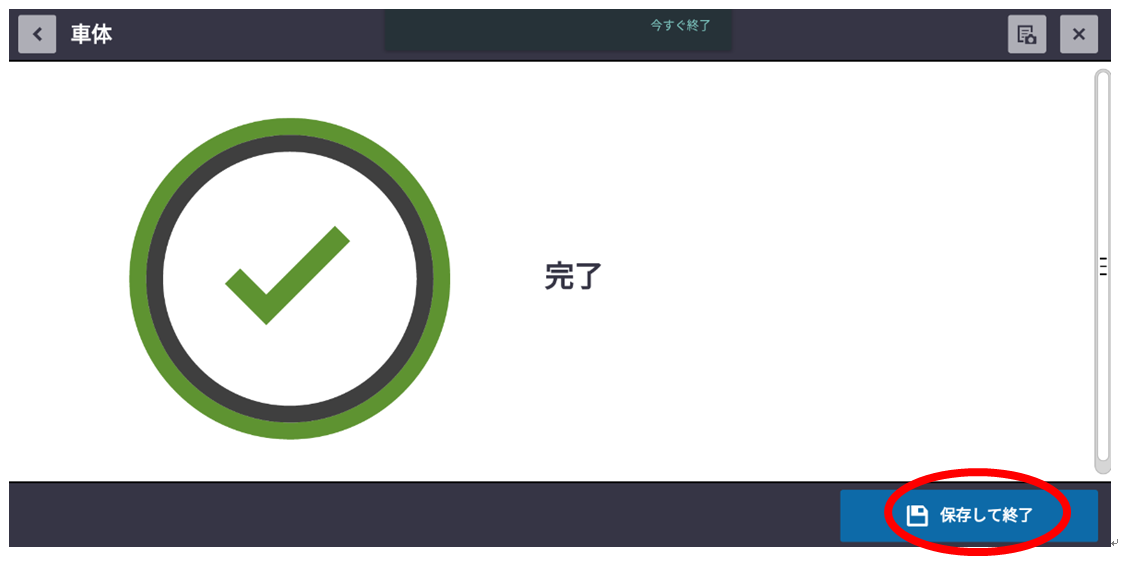
11.完了が表示されたら、<保存して終了>を選択して、キャリブレーションを終了します。
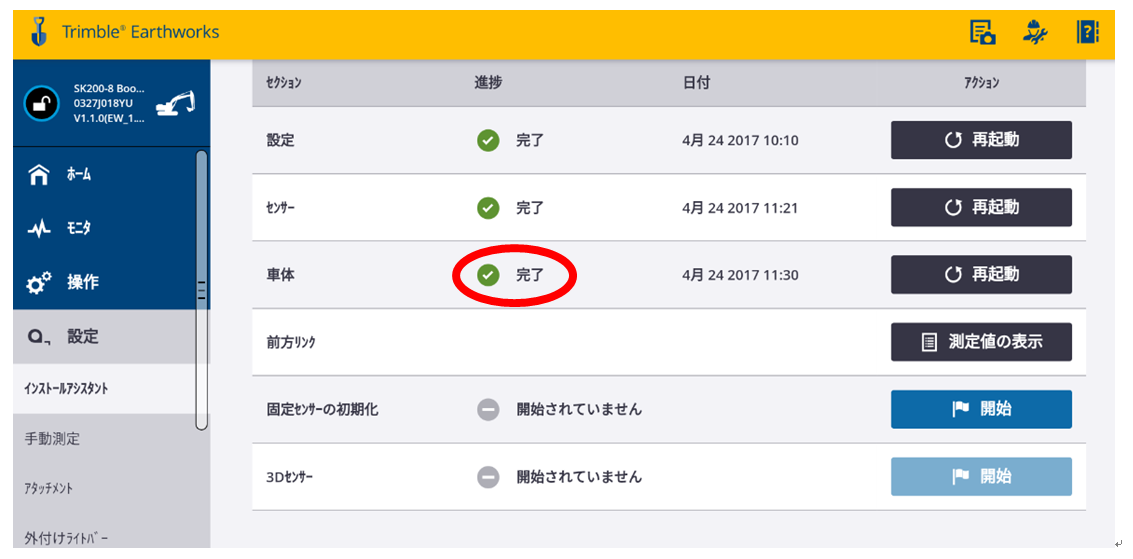
12.インストールアシスタント→<車体>項目の進捗が<完了>に変化していれば、車体のキャリブレーションは終了です。次工程へ進みます。
コメント
0件のコメント
サインインしてコメントを残してください。