
2-8 3Dセンサー
概要
この項目では重機に付けたGNSSアンテナを使用してキャリブレーションを実施します。
前提条件
このキャリブレーションを行う際はRTKの基準局が必要になります。
手順
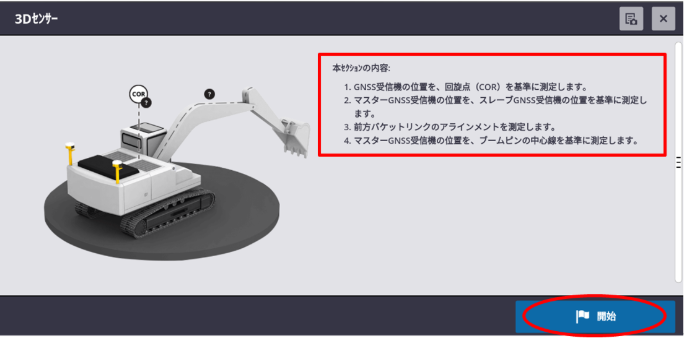
1.インストイールアシスタントの3Dセンサーの<開始>を選択します。

2.コメントを読み、<開始>を選択します。
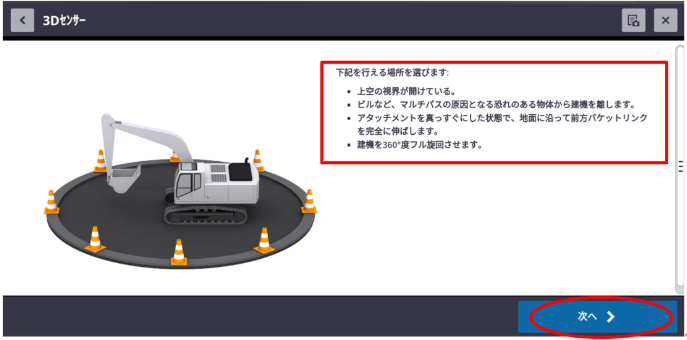
3.コメントを読みます。
重機を360°旋回したり、アタッチメントをめいっぱい伸ばすので、重機まわりの安全を確認してからキャリブレーションを開始して下さい。
またGNSSの受信状態が悪いと、キャリブレーションが出来ない場合があります。
上記がクリア出来たら<次へ>を選択して下さい。
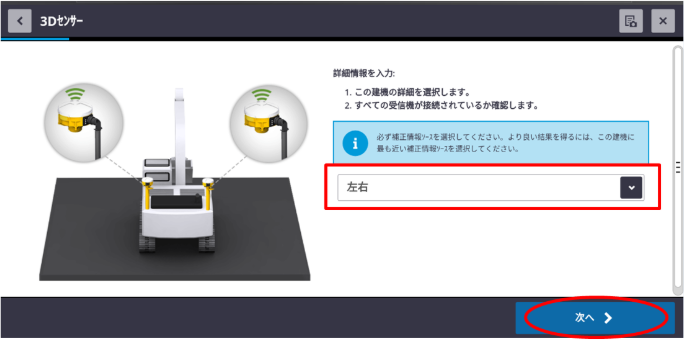
4.<左右>を選択し、<次へ>を選択します。
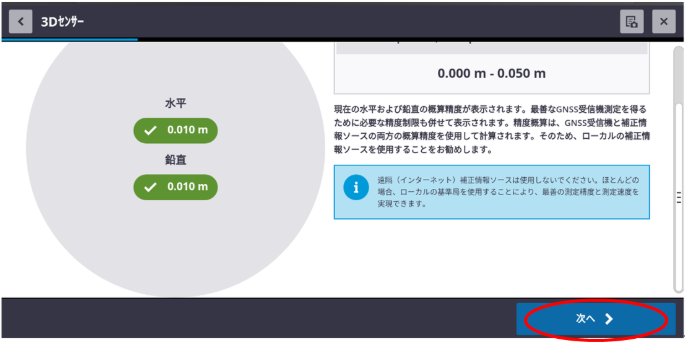
5.GNSSの精度を確認します。
上空が開けてなかったり、建物の壁が近くにあった場合はここに表示される精度が悪くなる可能性があります。その際は重機を移動させるなどを行い、精度が良くなるようにして下さい。
※VRS及び自動追尾型TSでは現状キャリブレーションは出来ません。
精度がよければ<次へ>を選択して下さい。
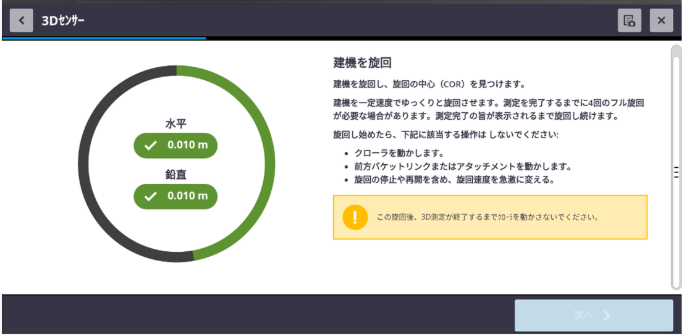
6.重機を動かします。旋回中心を認識する為に、重機を旋回させます。
旋回はゆっくり4回転程します。
準備が出来たら<読み取り開始>を選択します。
※この調整以降、重機のクローラを動かすことが出来ません。
誤ってクローラを動かした場合は最初からキャリブレーションを行います。

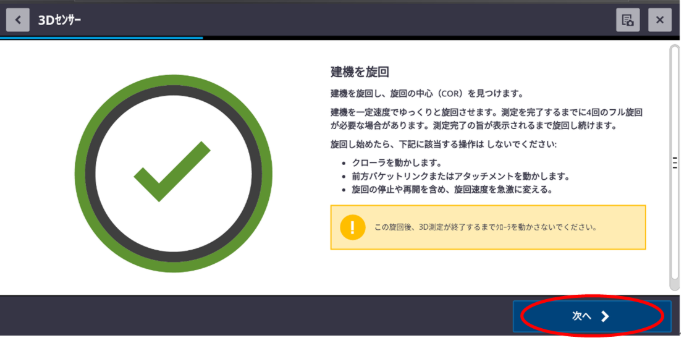
7.旋回を始めると、重機の図がインジケーターに変わります。
インジケーターがチェックマークに変わるまで、ゆっくりと一定のスピードで旋回します。
8.チェックマークに変わったら、<次へ>を選択して、調整を続けます。
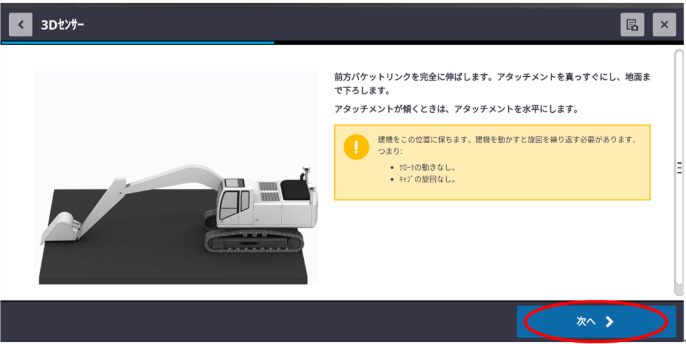
9.表示された図と重機が同様になるよう重機を操作します。
この時アームとバケットをなるべくめいっぱい伸ばし、バケットの爪先を地面につけます。
この姿勢のまま、<次へ>を選択し、計測を開始します。
計測時の写真です。

10.<読み取り開始>を選択し、キャリブレーションを続行します。

11.重機の図がインジケーターに変わるので、チェックマークになるまで待ちます。
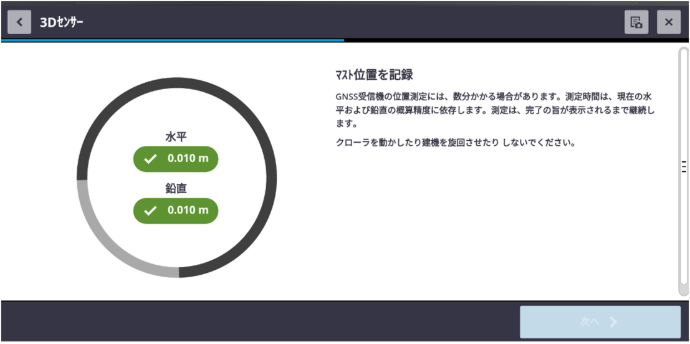
12.チェックマークに変わったら<次へ>を選択し、キャリブレーションを続行します。
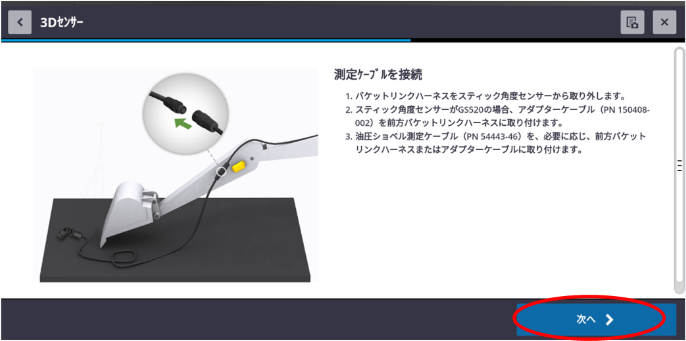
13.キャリブレーション用のケーブルを接続します。
この際アームセンサーに繋がれている4pinコネクタを外して、キャリブレーション用のケーブルに接続します。接続したら<次へ>を選択します。

|
この部分を外して、キャリブレーション用のケーブルを取付けます。 |
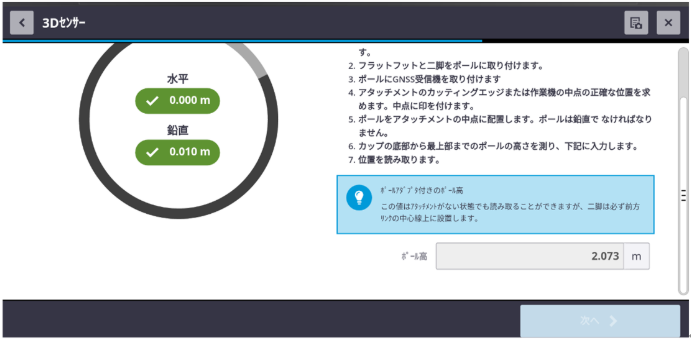
14.右側のGNSSアンテナを外し、キャリブレーション用のケーブルと接続します。
この時、GNSSアンテナはバケットの先端の中央部分にGNSS用のポールを使用して計測します。
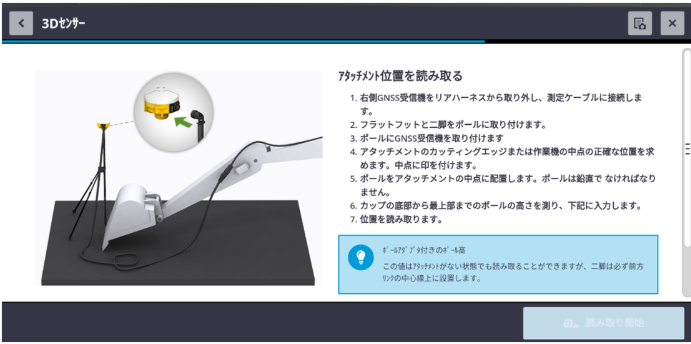
実測時の写真です。

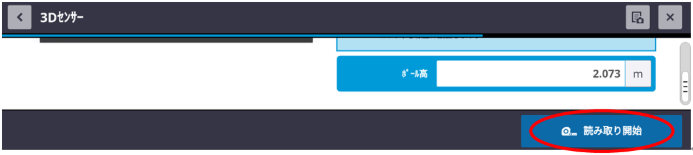
またこの時のポールの高さを入力します。弊社のキャリブレーションkitを使用する場合は<2.073>と入力します。※画面の下の方に入力場所がありますので、スクロールしてこの項目を表示させて下さい。

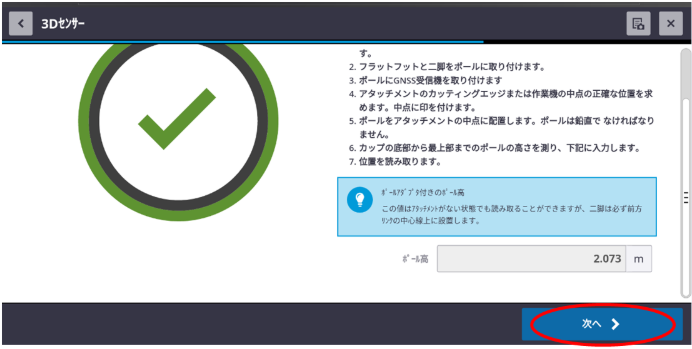
15.準備が出来たら、<読み取り開始>を選択し、計測を開始します。
16.重機の図がインジケーターに変わるので、チェックマークに変わるまで待ちます。
17.チェックマークに変わったら、<次へ>を選択します。
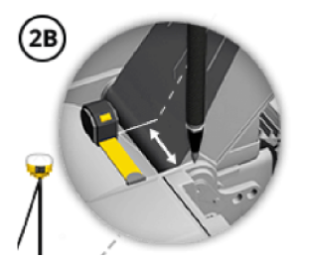
18.ポールをブームピンの中心に移動して、測定を続行します。
準備が出来たら<読み取り開始>を選択します。
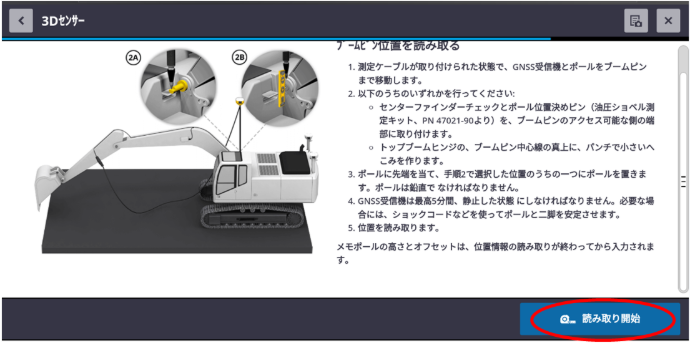
実際の計測時の写真です。

19.重機の図がインジケーターに変わるので、チェックマークに変わるまで待ちます。
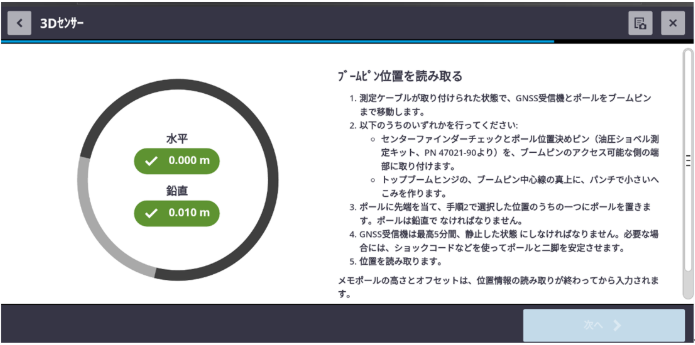
20.チェックマークに変わったら、<次へ>を選択します。
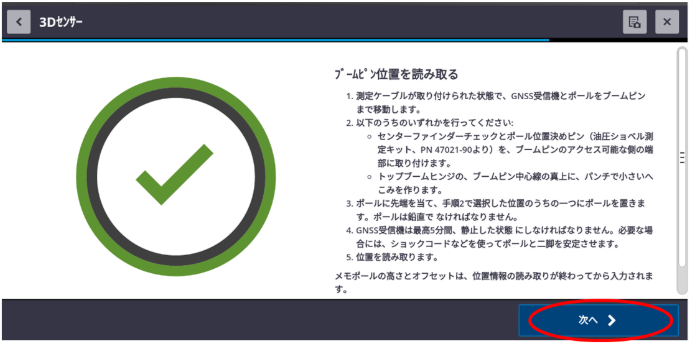
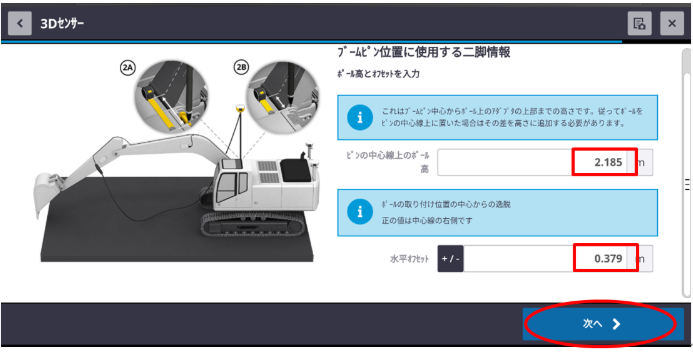
21.ポールを立てた位置を入力します。
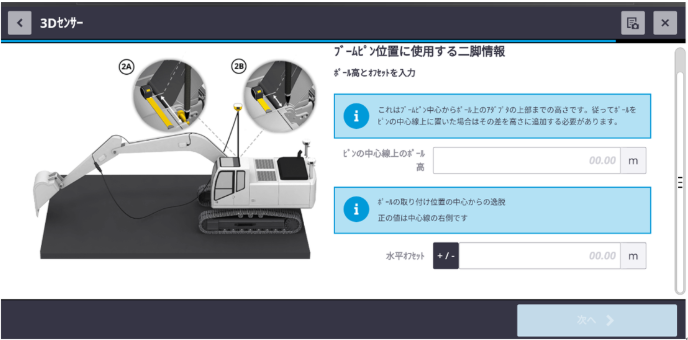
ポール高とオフセット:ブームピンの中心にポールの先端を立てられた場合には、前項と同じく<2.073>と入力します。但し実際はブームの中心位置にポールを立てる事は難しい為、ポールを立てやすい位置にオフセットします。
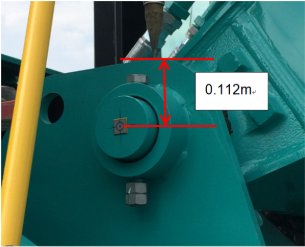
写真の様にブームの中心からずれた位置にポールを立てた場合には、この高さを<2.073>にプラスします。この時は0.112m高い位置にオフセットしたので、2.073+0.112=2.185と入力します。
水平オフセット:ブームの中心からポールを立てた場所までの距離を入力します。
この時のポールの水平オフセットは0.379だったので、この数値を入力します。
22.上記数値入力後の画面です。
数値が間違っていなければ<次へ>を選択します。
23.<保存して終了>を選択して、3Dセンサーのキャリブレーションを終了します。

コメント
0件のコメント
サインインしてコメントを残してください。