
2-4 寸法入力
概要
マシンガイダンス/マシンコントロールを行う際に重機各箇所の寸法が必要になります。
この記事では計測した重機寸法の入力手順について説明します。
前提条件
・全てのデバイスが装着され、各ケーブルも全て接続が完了していること。
・前方リンクの入力
基本的な寸法入力は重機のピンとピンの間の距離を測り、入力します。入力に必要な重機のピン位置は下段の通りです。

この他に、バケット・アーム・ブームセンサーの中心も入力に必要となります。
事前に各ポイントを計測する際は忘れないようにしてください。
以降は、項目順に数値を入力していきます。
各項目ともコメントを読み、精度が出るように入力して下さい。
手順
1.前方リンク項目の<測定値の表示>を選択します。

2.<設定> → <手動測定>の画面に移ります。
その中に<車体>・<ブーム>・<スティック>・<アイドラアーム>の4つの項目があります。項目ごとに数値を入力していきます。

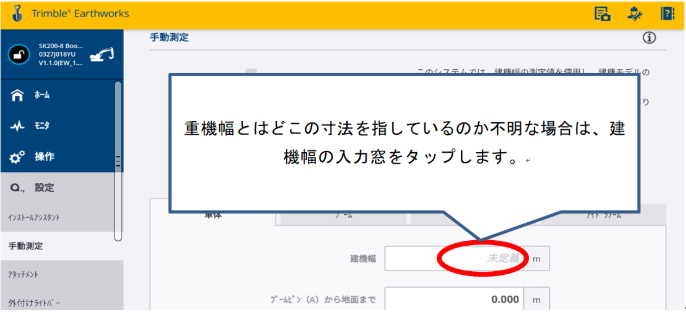
※この時どこの寸法を測って入力するのか不明な際は、入力したい項目を選択して下さい。選択すると画面上に測るべき場所の図が表されます。これはこの<車体>項目だけではなく、すべての項目に適用されております。もし作業を進める際に、どの寸法を入力するか不明な場合は、入力したい項目を選択し、画面上に現れる図を参照して下さい。
下段は例です。
3.車体の入力
車体の寸法を入力します。
この項目では2か所寸法を計測し、入力します。
画面に従い、<建機幅>と<ブームピン(A)から地面まで>を入力して下さい。
入力単位は<メートル>です。

4.ブームの入力
①ブームの寸法を入力します。
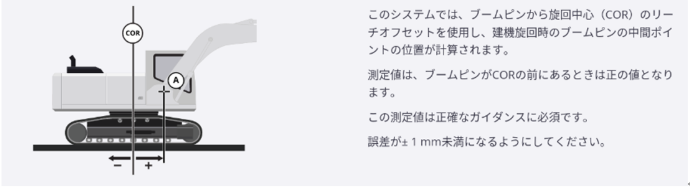
CORのオフセットを入力します。
②ブームピンの中心(A)とアームピン中心(B)の距離を入力します。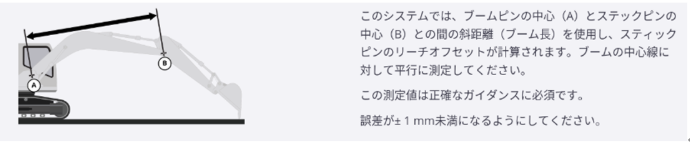
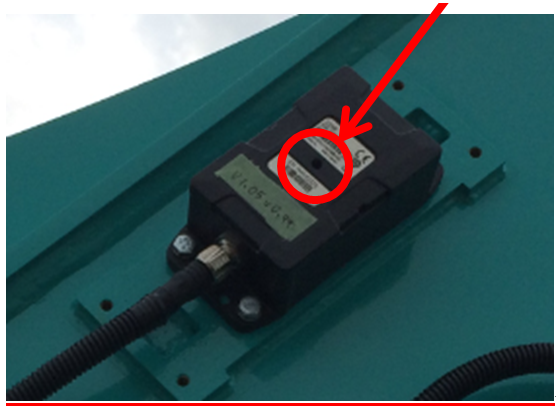
③ブームピンの中心(A)とブームセンサー中央にあるへこみ(SB)の距離を入力します。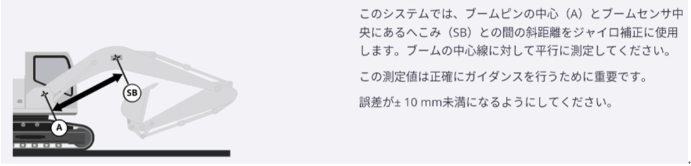
④ブームセンサー中央にあるへこみ(SB)とアームピンの中心(B)の距離を入力します。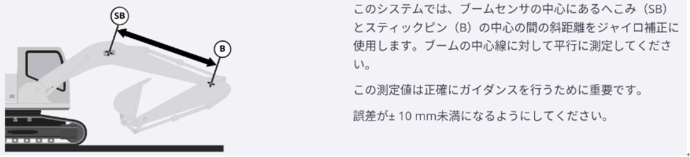
⑤以上でブームの入力は終了です。次はスティック(アーム)の寸法を入力します。
5.スティックの入力
①アームの寸法を入力します。
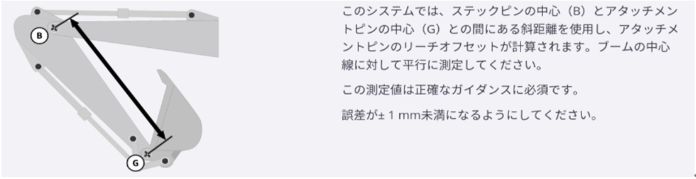
アームピンの中心(B)とバケットピンの中心(G)の距離を入力します。
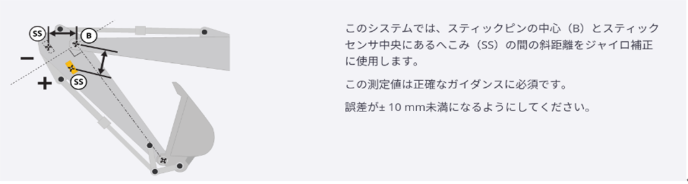
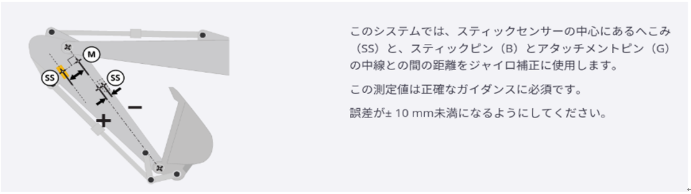
②アームピンの中心(B)とアームセンサー中央のへこみ(SS)の距離を入力します。
※この時、アームピンの中心(B)とバケットピンの中心(G)を結んだ線を基準にし、ピン(B)から垂直に線を引いたと仮定をします。その垂直の線よりバケット側にアームセンサーがある場合は、(B)と(SS)の距離は+(プラス)で入力します。垂直の線よりアームシリンダーピン(S)側にある場合は-(マイナス)で入力します。
③アームピンの中心(B)とバケットピンの中心(G)を結んだ線を基準にし、アームセンサー中央のへこみ(SS)からその線に垂直に引いた線の距離を入力します。
※この時、アームピンの中心(B)とバケットピンの中心(G)を結んだ線を基準にし、ピン(B)から垂直に線を引いたと仮定をします。その線よりバケットシリンダー側にアームセンサーがある場合は+(プラス)で入力します。垂直の線よりキャビン側にアームセンサーがある場合には-(マイナス)で入力します。
④以上でスティックの寸法入力は終了です。次はアイドラアームの寸法を入力します。
6.アイドラアームの入力
①アイドラアームの入力を行います。
ピン(D)とバケットピンの中心(G)の距離を入力します。
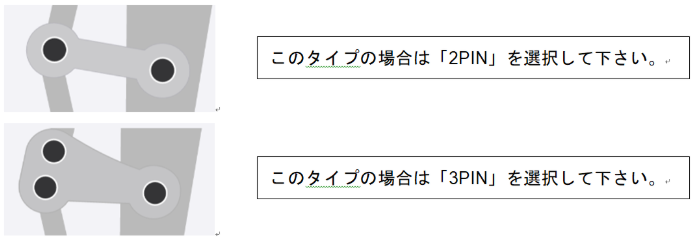
②ドッグボーンのタイプを選択します。
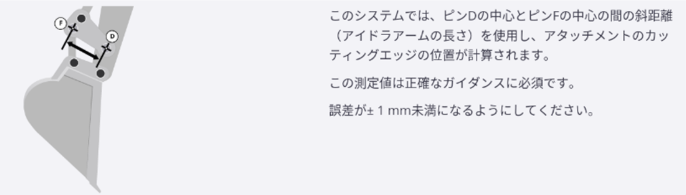
③ピン(D)とピン(F)の距離(アイドラアームの長さ)を入力します。
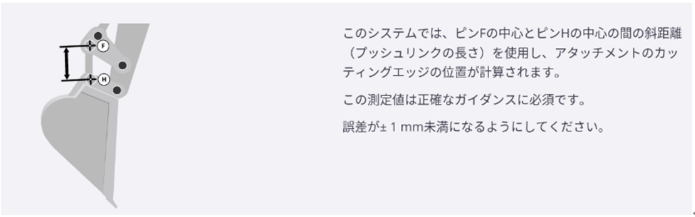
④ピン(F)とピン(H)の距離(ブッシュリンクの長さ)を入力します。
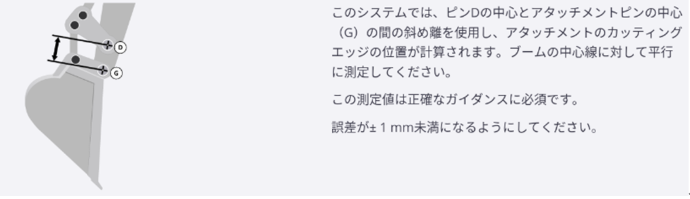
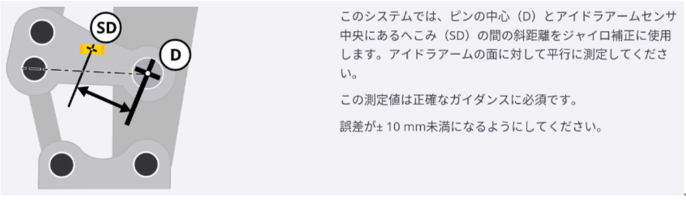
⑤ピン(D)の中心とバケットセンサー中央にあるへこみ(SD)の距離を入力します。
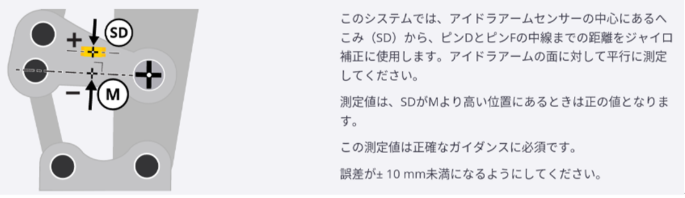
⑥ピン(D)とピン(F)を結んだ線とバケットセンサー中央のへこみ(SD)の距離を入力します。
※この時、ピン(D)とピン(F)を結んだ線を基準にし、ピン(SD)から垂直に線を引いたと仮定をします。その線よりバケットシリンダー側にバケットセンサーがある場合は+(プラス)で入力します。垂直の線よりバケットアタッチメント側にバケットセンサーがある場合には-(マイナス)で入力します。
⑦以上でアイドラアームの入力は終了です。次はバルブコントロールに必要な寸法を入力します。
7.バルブコントロールに必要な寸法の入力
バルブコントロールの入力を実施します。
※この項目で必要とされる寸法の精度は±1mmです。
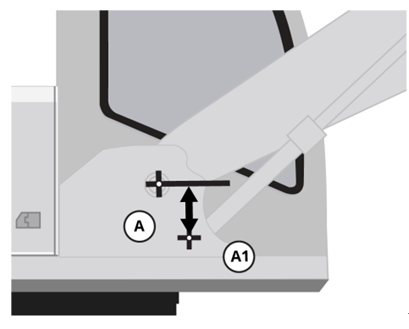
①ピン(A)からピン(A1)の距離を入力します。
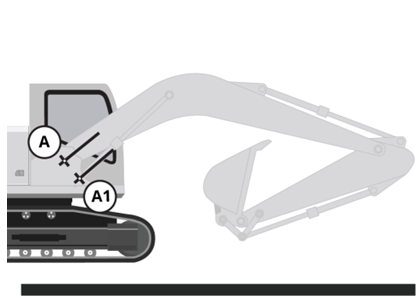
②ピン(A)とピン(A1)の高低差を入力します。
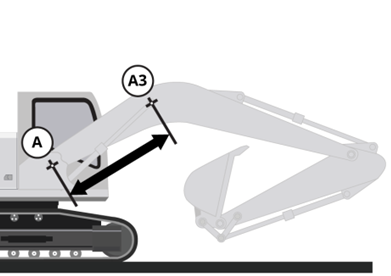
③ピン(A)から(A3)の距離を入力します。
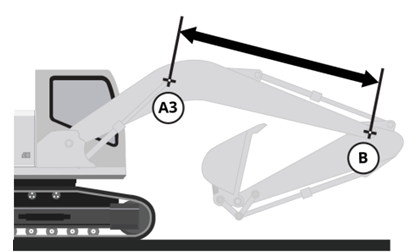
④ピン(A3)からピン(B)までの距離を入力します。
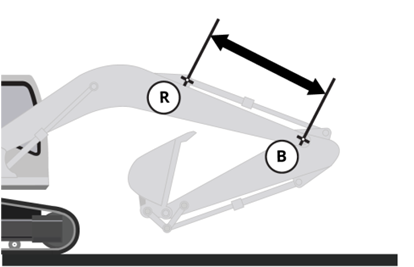
⑤ピン(A)からピン(R)までの距離を入力します。
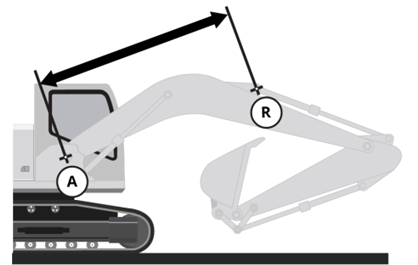
⑥ピン(R)からピン(B)までの距離を入力します。
⑦以上で寸法の入力は終了です。次項目では角度センサーのキャリブレーションを行います。
8.レーザーキャッチャー取付け時の寸法入力
①設定→手動入力→スティックを選択します。

②スティックに新たに必要な寸法の入力項目が増えているので、その寸法を測って入力します。
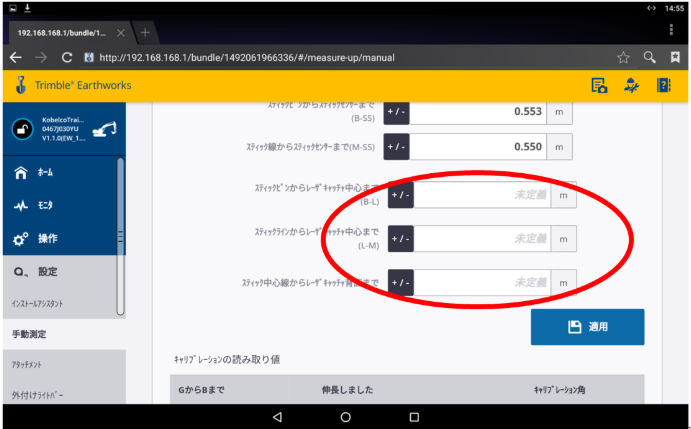
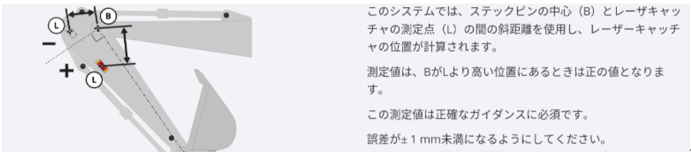
③スティックピンの中心(B)とレーザーキャッチャーの測定点(L)の距離を入力します。
※この時、アームピンの中心(B)とバケットピンの中心(G)を結んだ線を基準にし、ピン(B)から垂直に線を引いたと仮定をします。その線よりバケット側にレーザーチャッチャーがある場合は+(プラス)で入力します。垂直の線よりアームシリンダーピン側にレーザーキャッチャーがある場合には-(マイナス)で入力します。
④アームピンの中心(B)とバケットピンの中心(G)を結んだ線を基準にし、レーザーキャッチャーの測点(L)からその線に垂直に引いた線の距離を入力します。
※この時、アームピンの中心(B)とバケットピンの中心(G)を結んだ線を基準にし、ピン(B)から垂直に線を引いたと仮定をします。その線よりバケットシリンダー側にアームセンサーがある場合は+(プラス)で入力します。垂直の線よりキャビン側にアームセンサーがある場合には-(マイナス)で入力します。
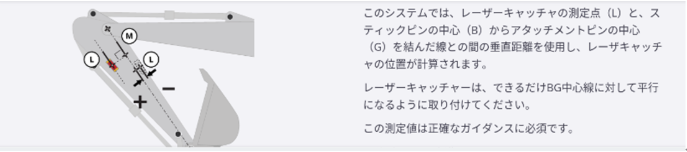
⑤アームの中心線からレーザーキャッチャー底面までの距離を入力します。
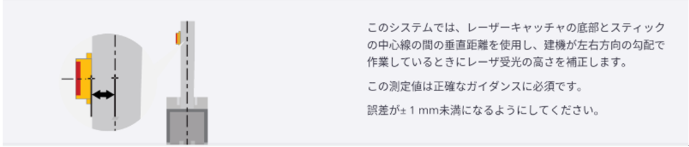
⑥以上でレーザーキャッチャーの寸法入力は終了です。
コメント
0件のコメント
サインインしてコメントを残してください。